時間:2025-02-19
時間:2025-02-19
 點擊:222次
點擊:222次
行 業(yè):工業(yè)
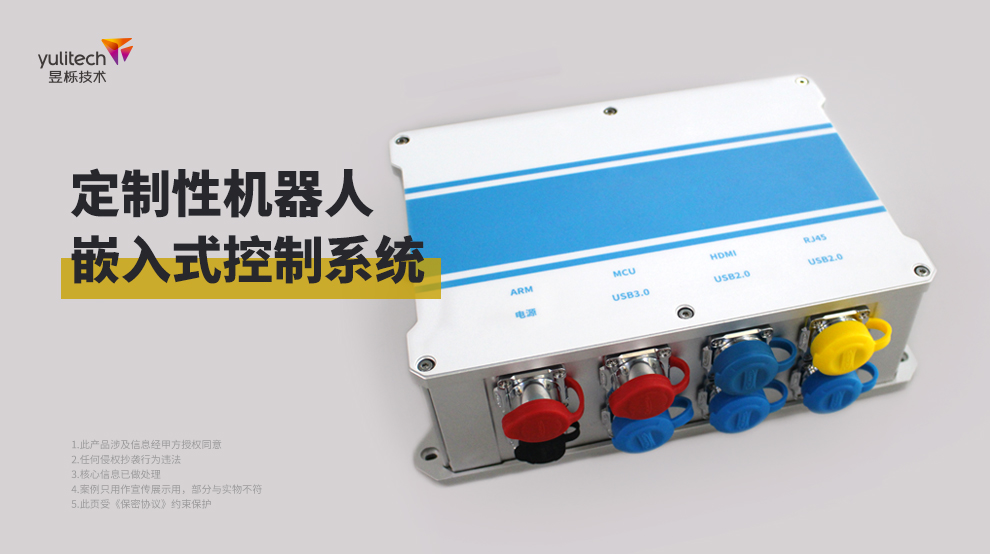
設計內(nèi)容:硬件設計,ARM設計,軟件設計,結(jié)構(gòu)設計
設計時間:2024年
產(chǎn)品簡述:將ARM芯片和嵌入式芯片集成在一張板子上對九個電機組成的手臂進行控制,ARM通過視覺控制算法計算出手臂的移動路線并通過網(wǎng)口于單片機進行通訊,單片機實現(xiàn)控制擠奶機器人的手指位置,控制手臂對接到奶牛的奶頭上,實現(xiàn)自動化的擠奶流程。

 京公網(wǎng)安備 111010602105026號
京公網(wǎng)安備 111010602105026號